地科学院罗小龙副教授团队成员尚莹莹在《科学教育与艺术》发表题为"面向城市街景的NAS语义分割"的研究论文。yl7703永利集团为论文第一署名单位,硕士研究生尚莹莹为论文第一作者,罗小龙副教授为通讯作者。
当前,自动驾驶量产落地、智能交通规模化应用与城市数字化转型加速推进,街景图像语义分割作为机器视觉环境感知的核心技术,承担道路、行人、车辆、交通标志等目标像素级精准识别任务,直接关系自动驾驶安全性、交通调度效率与城市信息采集精准度。但实际应用中,该技术面临三大核心难题:跨地域场景泛化能力弱,欧洲规整街道、印度拥堵路况、全球多样街景下模型精度波动大;行人、非机动车、交通标志等小目标分割精度低,易漏检错分;高精度模型推理速度慢,难以满足车载实时部署需求。同时,传统神经架构搜索(NAS)存在搜索空间通用性强、街景适配性不足、搜索效率低、搜索与训练性能不一致等问题,制约技术落地应用。
针对上述痛点,尚莹莹同学开展系统性创新研究。研究以DeepLabV3+为基线模型,通过引入FPN多尺度特征融合、优化ASPP模块空洞率组合、集成DEFE双注意力增强机制,有效提升模型小目标识别能力与复杂背景抗干扰性能。在此基础上,创新构建街景定制化NAS搜索空间,涵盖主干网络、ASPP模块、解码器特征增强三大核心维度,设置模块化依赖约束剔除无效架构;提出融合延迟约束的改进 NAS 策略,采用两阶段搜索框架、Gumbel-Softmax离散化优化与多目标损失函数,同步优化分割精度、推理时延与跨场景泛化能力,依托NNI工具链完成自动化架构搜索,最终研发NAS-SSNet模型。
实验结果表明,NAS-SSNet模型性能表现优异:在Cityscapes数据集上平均交并比(MIoU)达83.8%,推理速度稳定在25.2fps;相较主流模型,小目标(行人、非机动车、交通标志)分割精度显著提升,雨雾等恶劣天气下精度降幅仅5.1%,跨数据集泛化能力突出。模型参数量仅29.5M,兼顾高精度、高实时性与轻量化优势,可有效支撑自动驾驶车载感知、智能交通监控、城市规划测绘等工程场景应用。
论文链接:https://scholar.cnki.net/zn/Detail/index/GARJ2021_7/SQMCF5019FC852F3F93BF29FD4B384BB1416
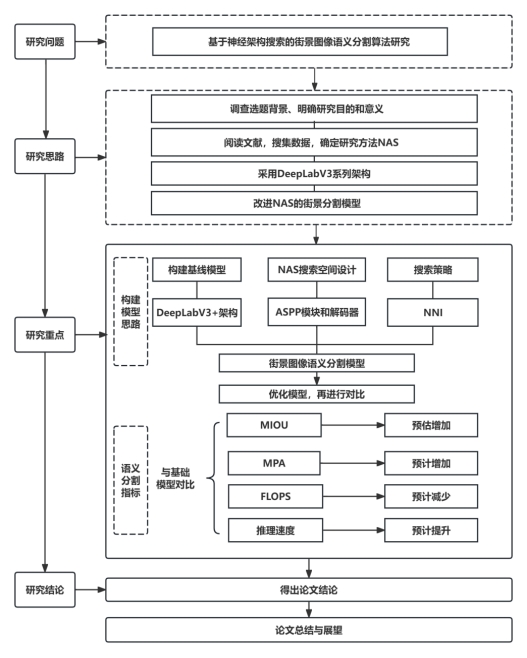
图1 技术路线图
图2 论文首页



